背景介绍
背景
嵌入式在汽车电子领域的应用
BMS:电池管理系统,限制充电放电温度电流大小等,包含限流模块(类似一个线圈)
BCM:车身控制器,对车体上的模块进行控制(一般在发动机左上角)
OBD:车载自诊断系统
关于通信频段:
芯片
国外单片机品牌:ST、德州仪器TI、恩智浦NXP
国内单片机品牌:兆易创新GD、MM、CH、HC
本次使用的芯片:STM32F103C8T6 ,手柄和飞控都用此芯片
单片机的组成:
- Cortex-M3内核
- 调试系统
- 内部总线
- 外设
- 存储器
- 时钟和复位
- I/O
总线:
- APB2总线(72MHZ)
- AHB总线(系统总线)
外设:
- 片上外设:存在于芯片内部的外设,出厂时由厂商集成在芯片内部的设备 | 例如: ADC,DAC,SPI,IIC,USART等
- 片外外设: | 例如:蜂鸣器
存储器:
- 内存(内存):SRAM
- 外存(磁盘):FLASH(闪存)
| 根据片上flash的大小,对单片机容量进行了划分 |
时钟和复位:
- 4个时钟源:
- HSE:外部高速时钟(给予内核以时钟,外接晶振,稳定)
- HSI:内部高速时钟(给予内核以时钟)
- LSE:外部低速时钟(给予RTC以时钟,外接晶振,稳定)
- LSI:内部低速时钟(给予RTC以时钟)
- 复位:
- 让程序恢复至最初位置重新运行
- 冷复位:断点再上电
- 热复位:上电时按下复位键
- 复位是可控的、优先级最高的异常
IO口:
- IO口是单片机和外接进行信息交换的唯一途径
编程方式
地址编程
[√] 寄存器编程(一堆地址按照逻辑集合在一起)
标准库编程(更加简单的编程方式)
HAL库编程(简洁的图形化编程,傻瓜式编程,使用软件STM32cubeMX)
本次使用寄存器编程
下载方式
ISP
ICP:ST-LINK、J-LINK、DAP-LINK(应用最为广泛)
IAP:固件升级技术
项目简介
遥控器:2.4G模块
飞机本体:姿态检测、闭环PID算法
GPIO的概述
区分端口号和管脚号
GPIO工作模式
通用型一般输入输出
GPIO示意图
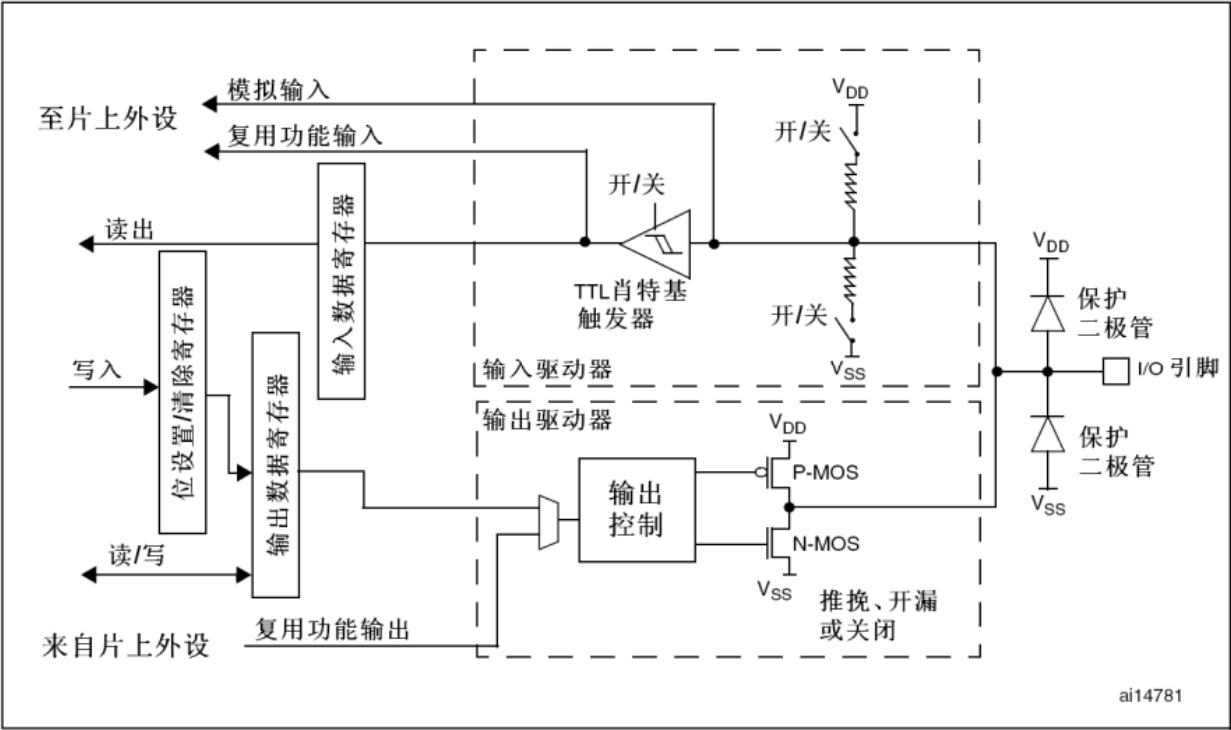
输入:
- 上拉输入:默认输入一个高电平信号,TTL 逻辑‘1’,3.3V 左右
- 下拉输入:默认输入一个低电平信号,TTL 逻辑‘0’,0.2V 左右
- 浮空输入:默认输入一个极性不确定的TTL电平(电路如果已有初始电平状态则可以使用)
- 模拟输入:和 ADC(模数转换器)一起使用(模拟信号经过TTL肖特基触发器后可得到方波)
输出:
- 通用推挽输出:可以输出高低电平
- 通用开漏输出:只能输出地低电平
- 复用推挽输出:片上外设输出高低电平
- 复用开漏输出:片上外设输出低电平
GPIO输出
GPIO寄存器描述
CRH CRL只跟管脚号有关,每个管脚对应四位
- CRL:端口配置低寄存器
- CRH:端口配置高寄存器
NOP延迟的实现
阻塞延迟:
- _nop();
非阻塞延迟:
- 定时器+状态机
delay.c
1 |
|
delay.h
1 |
|
STM32F103VET6 单片机主频最大为 72MHz
T=1/f=1/72000000s=1/72000000*10^6us=1/72us
1us=72*T(72个__nop();)
1 编写LED灯、蜂鸣器代码
2 使用延时函数实现流水或呼吸显示
3 编写按键控制函数,可以达到对灯或蜂鸣器的控制
LED灯、蜂鸣器的配置代码
gpio.c
1 |
|
gpio.h
1 |
|
beep.c
1 |
|
main.c
1 |
|
寄存器配置的一般方法
三目运算符
三目运算符概述
1 | (X)?(Y):(Z) |
当X=1即X为真,执行Y语句
当X=0即X为假,执行Z语句
进行宏定义
类似代码
1 | //逻辑伪代码 |
在主函数中调用
1 | LED1_Ctrl(1); //调用亮灯程序 |
呼吸灯
使用delay的方式实现:
1 | void LED_Breathe(void) |
按键
消除抖动
按键获取键值
1 | uint8_t KEY_GetVal(void) |
异常与中断
手册的5.1节给出了异常模型
中断数目可配置为1~240
优先级
优先级数字越小,对应的优先级越高
- 占先优先级
- 次级优先级
只有占先高的才能打断占先低的,若占先一致且同时抵达,则次级高的先执行
假设此时有三个ISR,A,B,C
| 占先 | 次级 | |
|---|---|---|
| A | 0 | 1 |
| B | 1 | 1 |
| C | 1 | 0 |
外部中断/事件控制器EXIT
9.2节
他有多种选择触发器,根据需求进行选择
请求挂起寄存器EXIT_PR
模拟/数字转换(ADC)
ADC位数越大,采得每份电压值越小,ADC精度越高
逐次逼近型
通道
有16个多路通道。可以把转换组织成两组:规则通道与注入通道
DMA
DMA,全称Direct Memory Access,直接存储器访问,是一种硬件机制,允许数据在内存和外设之间直接传输,无需CPU介入。(可视为数据搬运工,只负责搬运数据,本身无存储空间)
DMA的数据传输方向:
- 偏上外设 ==> 存储器
- 存储器 ==> 片上外设
- 存储器 ==> 存储器
独立数据源:从哪里取出数据
目标数据区:数据放到哪里去
DMA资源:DMA1有7个通道,DMA2有5个通道
DMA2和ADC3都只存在于大容量和互联设备中
DMA可协作CPU搬运外设的数据,但值得注意的是,DMA优先级是低于内核CPU的。
从外设数据寄存器或者从当前外设/存储器地址寄存器指示的存储器地址取数据,第一次传输时的开始地址是DMA_CPARx或DMA_CMARx寄存器指定的外设基地址或存储器单元。
存数据到外设数据寄存器或者当前外设/存储器地址寄存器指示的存储器地址,第一次传输时的开始地址是DMA_CPARx或DMA_CMARx寄存器指定的外设基地址或存储器单元。
执行一次DMA_CNDTRx寄存器的递减操作,该寄存器包含未完成的操作数目。
数据传输的宽度
- 字(8位)
- 半字(16位)
- 全字(32位)
2.4G通信模块
数据链路层:
AT指令集——modbus通讯协议:串行通信协议
网络层:
TCP协议簇、MQTT协议
IIC协议
协议类似USART(串口)、SPI
IIC的特点:串行、同步、半双工
硬件层:
SCL时钟线:给主机和从机提供同步时钟,确保通信的稳定性
SDA数据线,传输数据
IIC的数据有效性:
SDA的状态只能在SCL为低电平的时候改变
当SCL为高电平时,SDA必须保持稳定(保持高或者低电平不能更改),当SCL为低电平时,才能改变电平状态
读写位在地址后面的原因
确认读还是写数据(读写输出输入有不同的状态)
PID算法
开环和闭环(PID是闭环中用的最多的)
P:比例
I:积分
D:微分
问题的解决:
使用ST-LINK进行代码烧录的情况下
下图为STLINK下载器

在没有进行驱动安装的时候,直接点击keil软件中的load按钮是无法写入的,可能会报一个”Cannot Load Flash Device Description!”的错误日志
1,在keil软件中点击下面的按钮

确保右下角显示为ONLINE在线状态
点击Keil::STM32F1xx_DFP(以使用的具体芯片为准)右侧install,在安装完成之后,会显示为Up to date
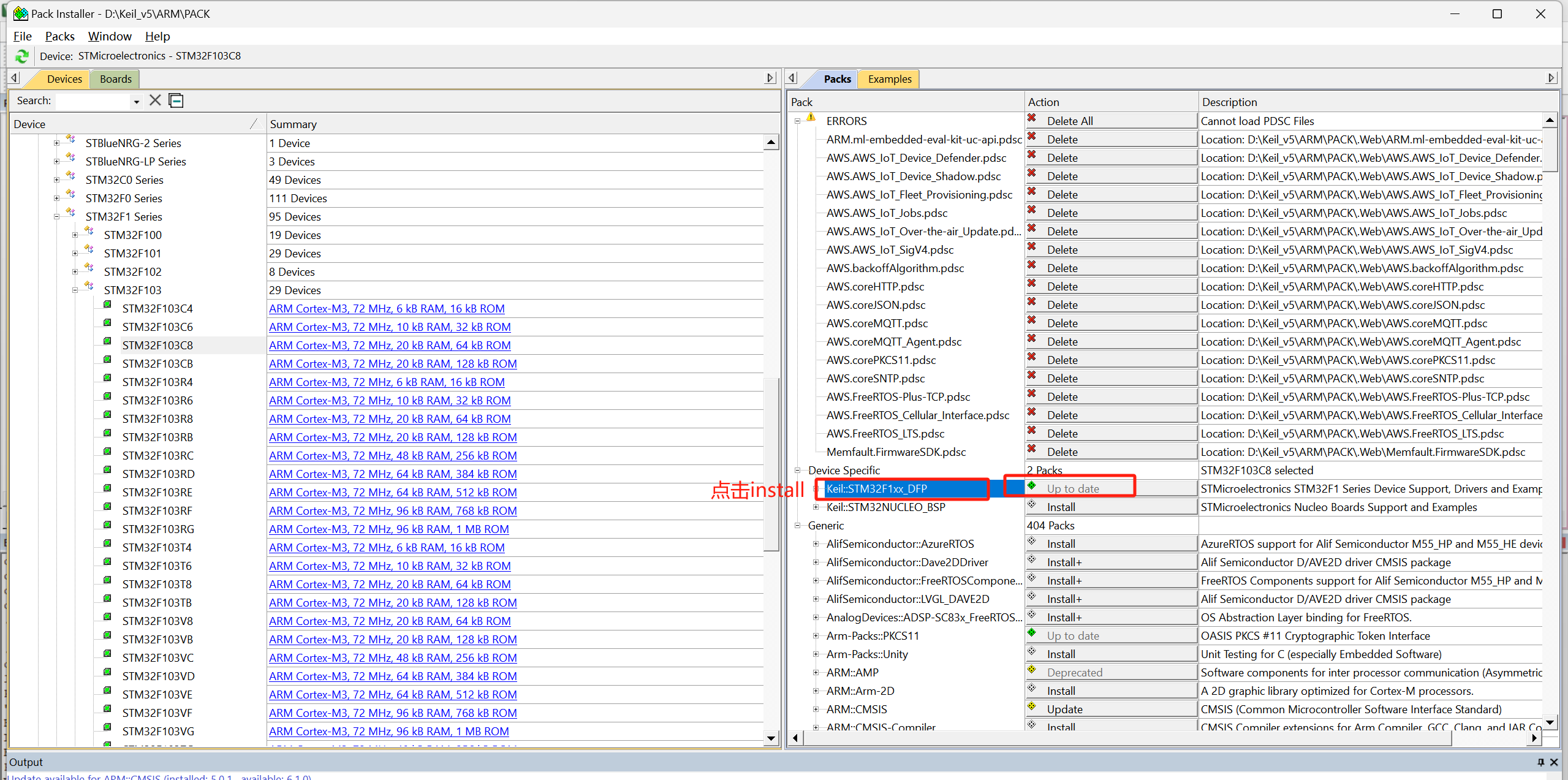
由于需要使用ST-LINK下载器(类似于USB的一个设备)下载程序,故还需要安装此下载器的驱动
驱动已上传google云盘:STLINK Utility.zip,链接下载
下载并解压完成之后,先进入STLINK Utility这个文件夹,双击setup.exe,安装完成后在点击STLINK驱动文件夹中的ST-LinkUpgrade.exe,此时将STLINK下载器插入usb口(注意不要在STLINK上插开发板),点击Device Connect,就可以显示连接上了STLINK,随后点击升级按钮即可。
在做完上述步骤后,重新启动keil,并连接好下载器、单片机,点击
在keil中编译好,然后点击load即可成功将程序烧录进开发板
